
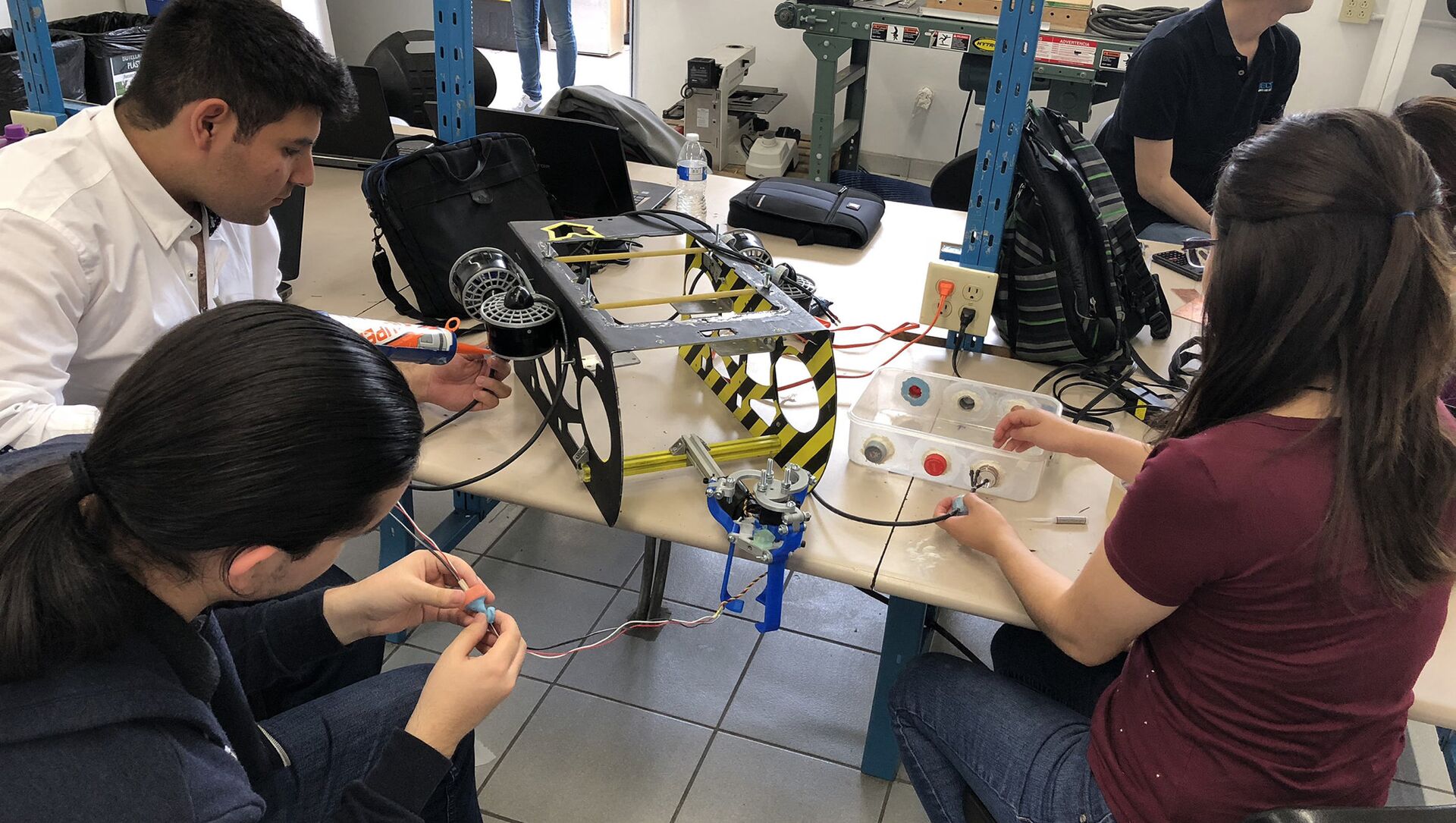
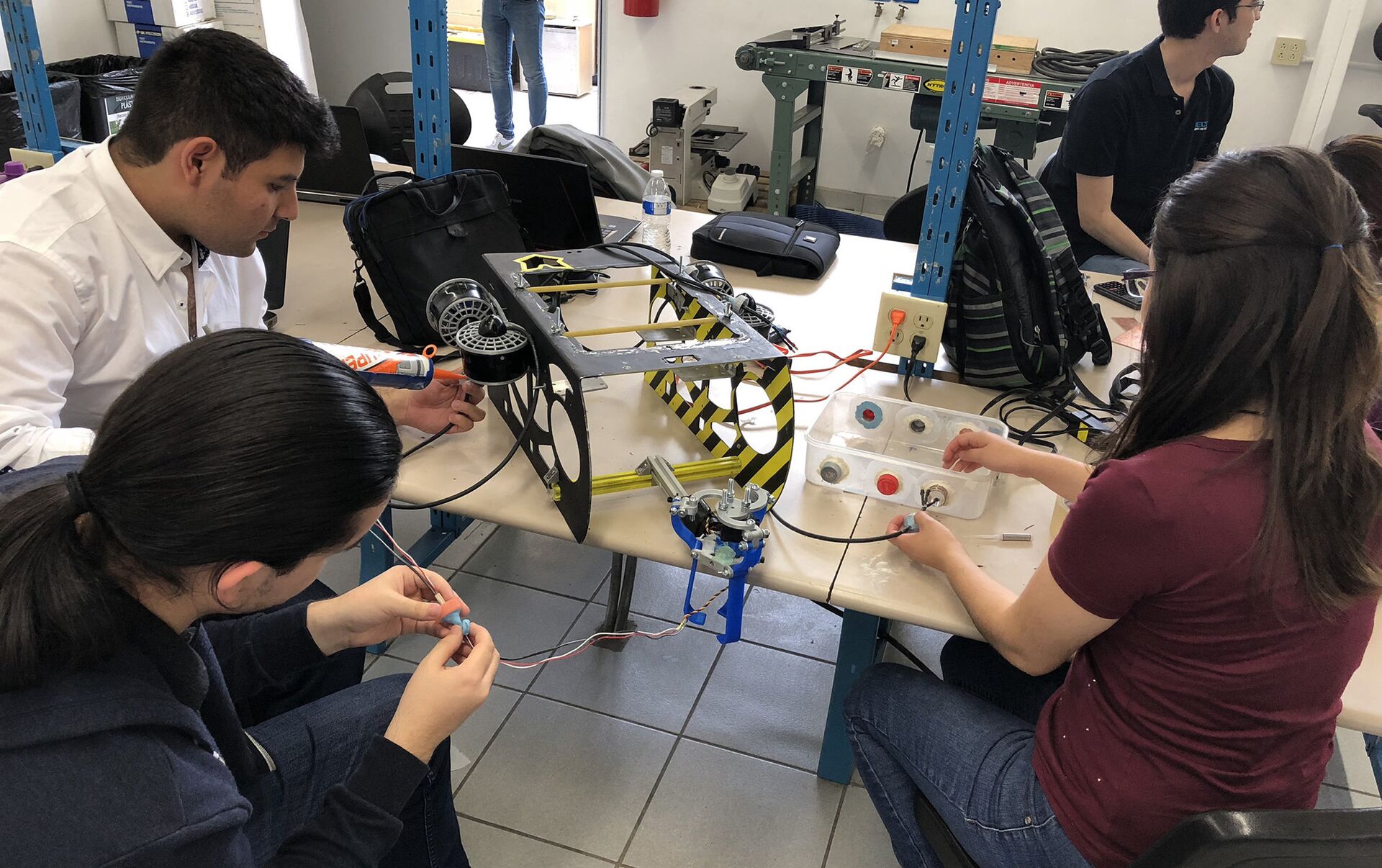
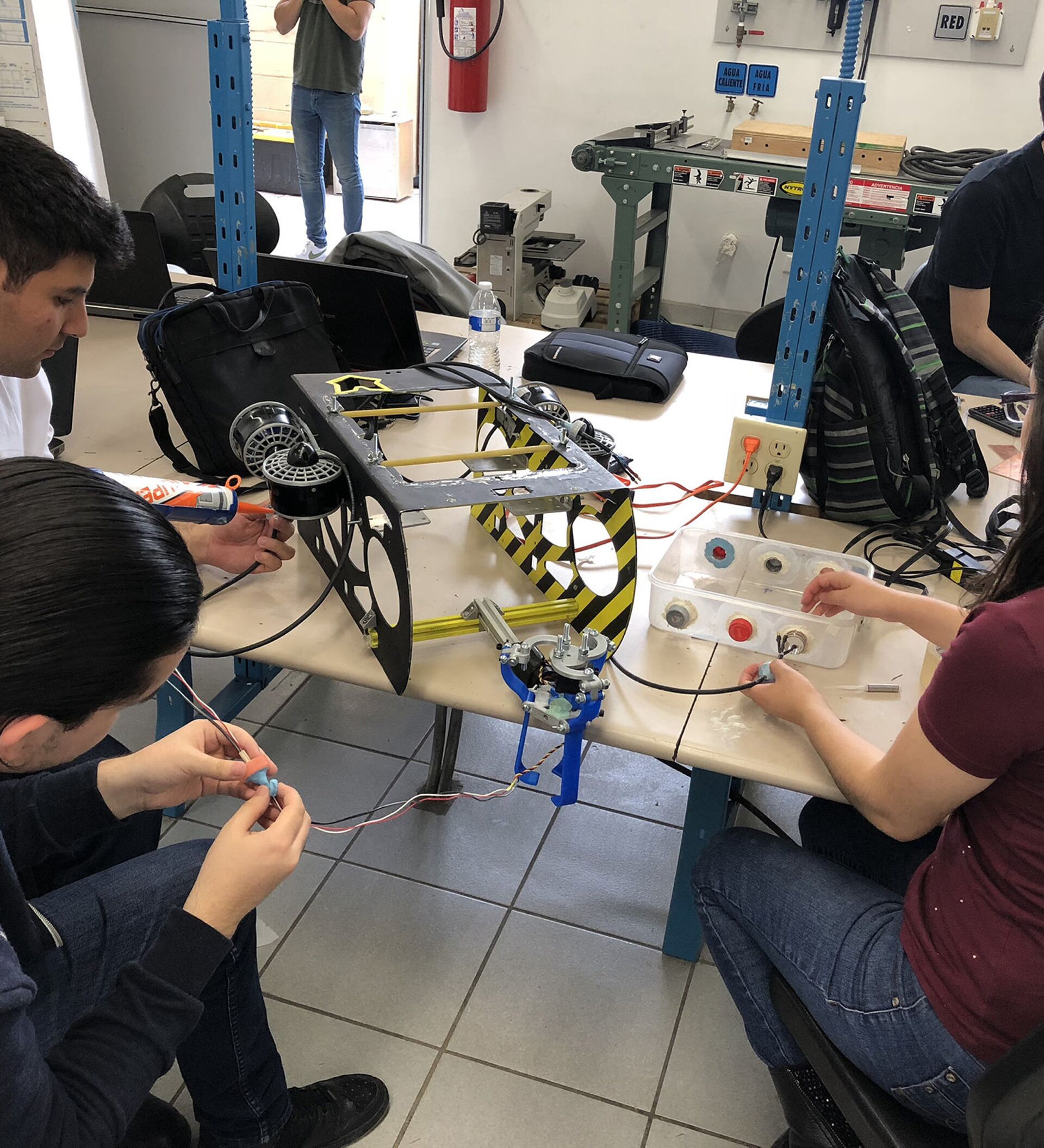
En este momento, los jóvenes están probando varios subsistemas y configuraciones para ver cuáles serán los más adecuados o con funcionamiento óptimo para llegar bien preparados a la el concurso estadounidense de autómatas submarinos.
")
De acuerdo con Luis Básaca Preciado, coordinador de Ingeniería en Cibernética Electrónica de la Escuela de Ingeniería del CETYS Universidad, el robot tiene una unidad de cómputo y visualización, la cual recibe todos los datos que son enviados desde el fondo del agua.
Temas relacionados: Filtran las imágenes del novedoso robot 'cazasubmarinos' estadounidense


Básaca Preciado precisó que la microcomputadora consta de 40 entradas y salidas digitales, un procesador de 64 bits quad-core, 1 GB de RAM, un módulo Wifi y Bluetooth integrado, conexión LAN 10/100, un puerto HDMI, y cuatro puertos USB, entre otras especificaciones tecnológicas.
"Este robot está diseñado para realizar diversas tareas bajo el agua, desde manipulación de objetos, hasta transferencia de energía por medio de ondas electromagnéticas para dispositivos submarinos, donde se dificulta la presencia de cableado físico", explicó.
Una de las ventajas de este vehículo consiste en que su fabricación se realiza a base de materiales de bajo costo y, cuando es posible, de material reutilizado, de estar forma se contribuye a la protección del medio ambiente.
También te puede interesar: Del robot Fedor a la respiración acuática: ¿cómo van los proyectos de la 'DARPA rusa'?
La "Marine Advanced Technology Education-ROV Competition" se divide en cuatro categorías: Explorer, Ranger, Navigator, Scout, y los estudiantes participarán en la primera, que consiste en una competencia internacional dividida en tres tareas principales.
")
La primera es detectar y recuperar un avión, tarea que se deberá lograr con el uso de algoritmos de posicionamiento y de predicción para determinar la ubicación de choque de la aeronave, después de un error de funcionamiento, posteriormente se tendrá que recuperar sumergiendo el robot.
")
La última tarea es posicionar un arreglo de turbinas para la generación de energía por medio de corrientes submarinas, donde además será necesario obtener la ubicación del punto de máxima generación de potencia bajo el agua por medio de cálculos de optimización.
El año pasado, estudiantes del Instituto Tecnológico y de Estudios Superiores de Monterrey (ITESM), campus Cuernavaca, participaron en este concurso y destacaron como el único equipo latinoamericano.
Asuntos relacionados: El robot sumergible ruso realiza cinco inmersiones en un día para detectar el ARA San Juan




{kind=link}
{kind=link}
{kind=link}
{kind=link}